澳門大學的無人駕駛研究近日取得兩項重大進展,一方面為多變天氣及複雜路況下的自動駕駛提供新的思路,另一方面為自動駕駛高精度模型本地化改造提供新的手段。有關成果將分別於兩個人工智能頂級年會發表。
近年來深度學習技術的發展大幅提升了機器感知、認知世界的能力。然而現實的任務常常面臨測試場景與訓練場景不同的問題,例如無人駕駛數據往往在行駛條件比較規範的城市路段獲得,這樣訓練的模型如果直接應用少見的惡劣天氣、路況不良等場景,容易造成效果大幅下降。針對此現象,澳大和百度提出了一種週期性重新初始化輸出層權重的方法RIFLE,並在大量的真實世界遷移學習任務上驗證了RIFLE算法的有效性。在多種模型結構(ResNet、Inception、MobileNet)和多種基礎的感知任務(分類、檢測、分割)上,RIFLE都有顯著的效果提升。此論文的第一作者李興建是澳大在讀博士生,將於人工智能領域公認的頂尖會議 ——國際機器學習年會(International Conference on Machine Learning)發表。
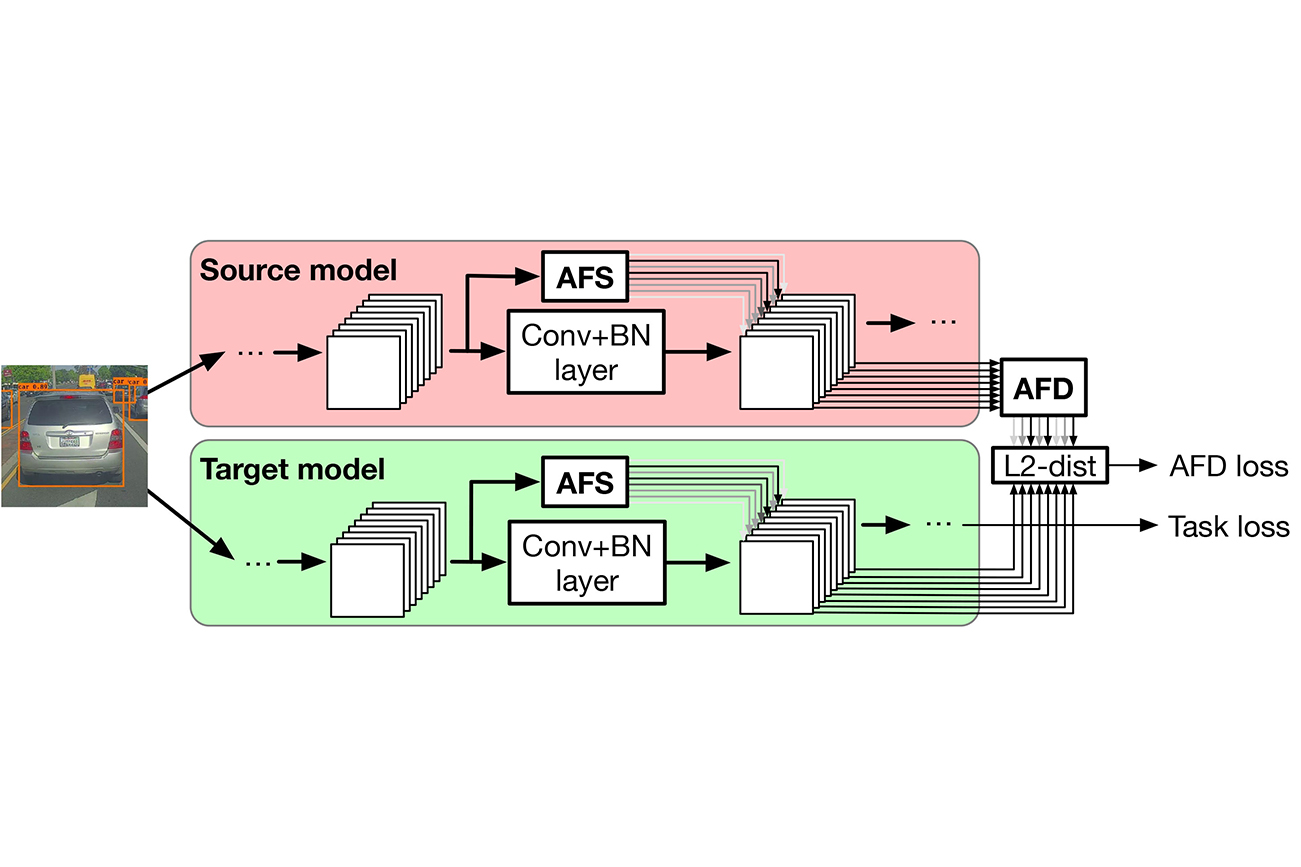
第二項重大進展是澳大、深圳先進院和百度對遷移學習中卷積神經網路模型的壓縮問題提出了一種壓縮方法,通過邊遷移邊壓縮相互補充的思想,在保證較高準確率的前提下,降低模型複雜度,提高運算速度。針對部分卷積層進行壓縮處理,可以進一步降低模型複雜度,同時保證模型的完整性,避免模型準確率驟降。實驗結果驗證ResNet-101在6個目標資料集上降低30%計算量,準確率幾乎保持不變。計算量降低90%以上,在多個資料集上模型還能保持0.70左右的準確率,相比之下,其他方法基本無法正常工作。此論文的第一作者王卡鳳是須成忠教授指導的先進院在讀博士生,將於另一個頂尖的人工智能領域的會議——國際學習表徵年會(International Conference on Learning Representations)發表。
澳大無人駕駛研究是澳門特別行政區科學技術發展基金“重點研發專項資助計劃”(檔案編號:0015/2019/AKP)的項目之一,目的是打造粵港澳大灣區一流的無人駕駛群體智能車載平台和車路協同自動駕駛試驗基地。項目由澳大智慧城市物聯網國家重點實驗室聯合內地優勢單位:中科院深圳先進技術研究院、國防科技大學、百度及深圳海梁科技共同承擔;並由澳大科技學院院長須成忠教授領導進行。
新聞來源:科技學院
媒體聯繫:澳門大學傳訊部
李巧雲 電話:(853) 88228004
林祖兒 電話:(853) 88228022
電郵:prs.media@um.edu.mo
澳門大學網頁:www.um.edu.mo