來源:《澳大新語》
近年來有數據及研究表明,人口老齡化的趨勢在不斷上升。公共設施中無障礙設施對於殘障人士和行動不便人士的日常生活極為重要。與此同時,智慧城市技術乃現今社會發展的重要方向。可惜的是,能應用智慧城市技術於優化殘障人士生活的研究及產品並不多。因此,我與研究團隊以人因工程結合智慧城市技術,研發一個創新、實用和便利的智能輪椅,對於改善殘障人士智慧出行及生活有著很大的意義。
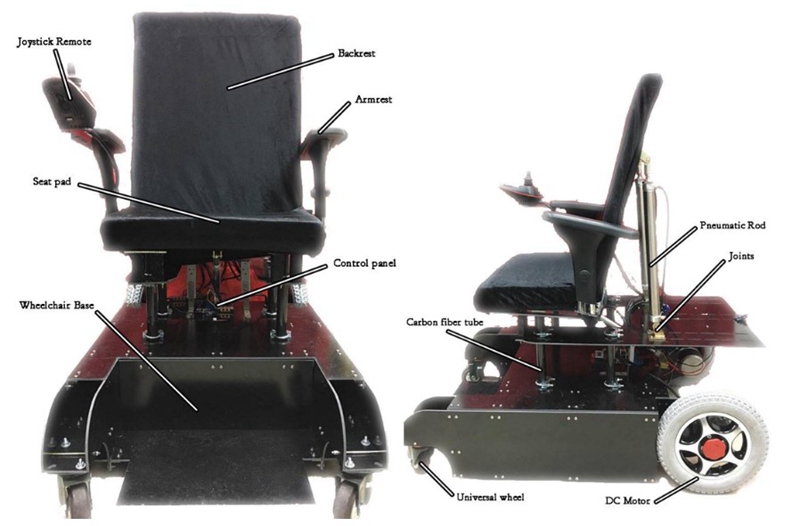
創新多功能智能電動輪椅
研究以人因工程為設計理念,結合人工智能算法,設計出一款創新多功能的智能電動輪椅,滿足殘障人士及長者優化出行的需求。同時,智能輪椅可以運用智能手環、腦電波控制和手機移動應用控制,增加使用的方便度及不同需要。
研究內容主要圍繞三個方面進行:智能輪椅多種控制方案的設計、產品功能設計以及產品外觀設計。產品外觀設計是符合人體工程學,結合澳門人的人體數據特徵標準。產品功能設計,基於目前市場已經有的產品功能,增加輔助起身和坐立功能,以不同的智能使用姿勢,方便使用者的生活需要以及降低他們因長期同一坐姿而產生一系列的身體健康問題。產品多種控制方案的設計乃使用 Myo 智能手環、腦電波控制器和手機移動應用程式,以切合使用者不同的使用需要及因應環境作出配合。
智能手環適合本澳需要
研究團隊通過 Myo 智能手環設備的手勢控制將用於智能電動輪椅。然而,現時的 Myo 智能手環只限制於 5 種不同的手勢。因此,為了滿足不同使用者的需求,研究團隊開發出更多的手勢控制,以配合智能輪椅的多功能控制。另外,手勢識別的準確性也需要提高,這是由於原設計是給外國人使用,他們的手臂肌肉與亞洲人不同,故相同的手勢,系統識別出來的準確性有所差異。為此,研究團隊研究基於 Akaike 信息準則的自回歸方法,以及基於強度分析的小波方法和 HilbertHuang 變換方法,對從肌肉表面肌電圖提取的信號進行分析,並且使用機器學習技術預測手勢,包括遺傳算法—反向傳播神經網絡算法,粒子群優化—反向傳播神經網絡算法,支持向量機方法和極限學習機算法,以達至 Myo智能手環適合本澳殘障人士及長者使用需要。
智能輪椅控制系統
這以人因工程為設計理念,結合人工智能算法,設計出來的創新多功能的智能電動輪椅,會配合壓力分佈分析系統及肌電信號,收集本澳殘障人士及長者在出行及生活上的壓力分佈數據及肌電數據,以便給予政府及公共設施機構在設計相關的建築物及設施,如巴士站、公園等,有著更科學的數據得以優化,配合澳門智慧城市落地使用在本澳殘障人士及長者生活上。
未來我與研究團隊將以失能老人長時間使用輪椅後的壓瘡問題為選題依據,通過研究失能長者的壓瘡成因,結合人工智能學習算法,擬合人體壓瘡形成的“壓力 – 時間”函數 F(t)。並基於該函數,建立智慧輪椅非線性控制系統模型。最終目標是設計一種可以通過深度學習演算法,預防壓瘡併發症的智慧輪椅控制系統。