A research team led by Zhou Bingpu, associate professor in the Institute of Applied Physics and Materials Engineering (IAPME) at the University of Macau (UM), has designed a flexible tactile sensor based on the principle of electromagnetic induction. The sensor can simulate the ‘stick-slip’ phenomenon experienced when a human finger scans across a surface, providing significant insights for the design of tactile feedback systems and emerging biomimetic devices such as soft robots. The research has been published in the internationally renowned journal Advanced Materials.
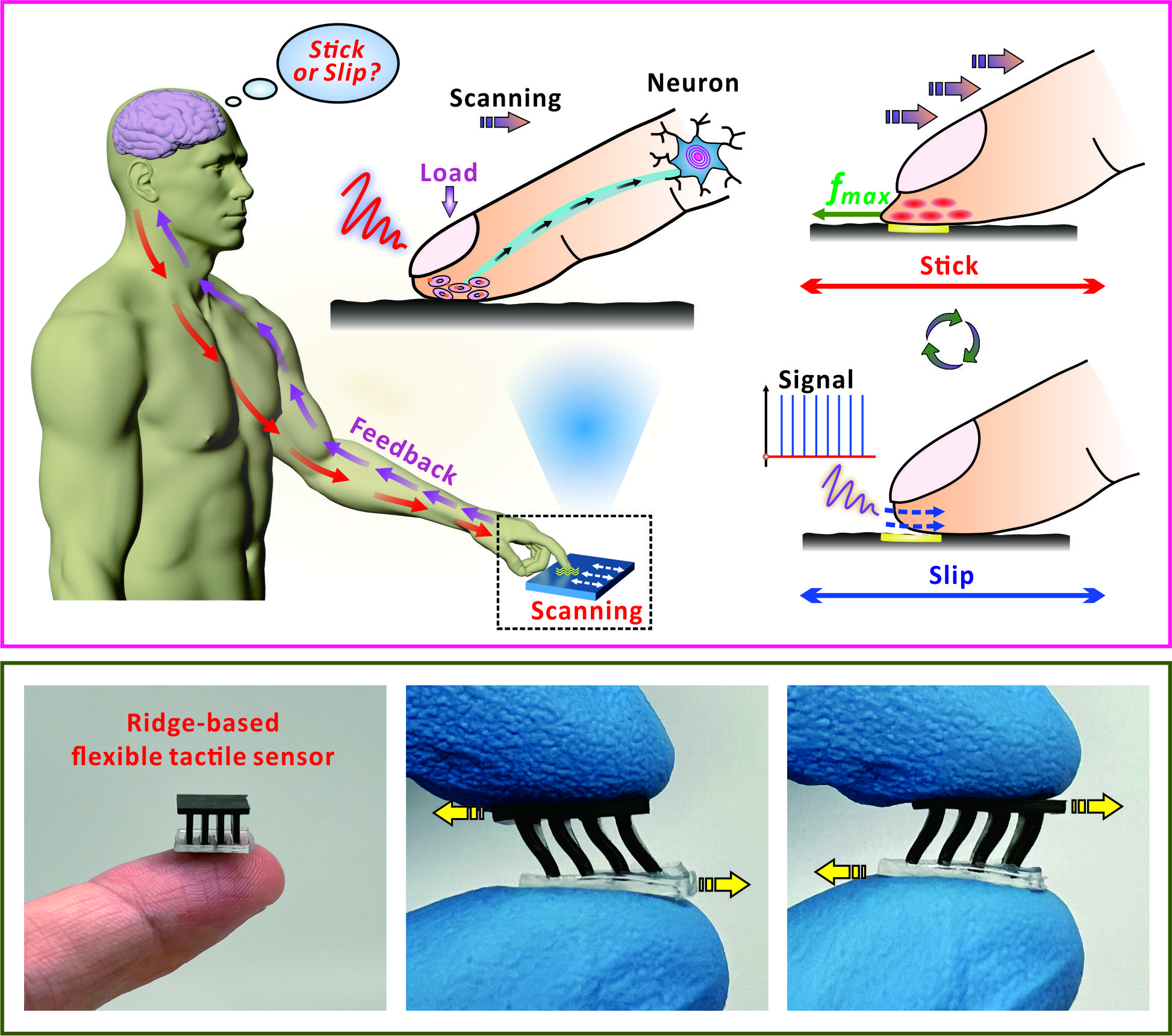
In daily life, humans often scan surfaces with their fingertips to perceive basic properties such as roughness, adhesion, wetting, and friction, where the ‘stick-slip’ behaviour plays an important role. This phenomenon arises from the difference in dynamic and static friction between the skin and the surface as the finger slides over a surface, resulting in periodic tangential deformation and rapid recovery of the skin. The tactile neurons further encode this dynamic process into neural signals and transmit them to the brain. As the skin deformation during sliding is closely related to the interfacial properties, the brain can interpret the ‘stick-slip’ phenomenon based on these signals, thereby enabling the perception of surface properties. However, it remains a challenge to fully replicate the shear deformation as the fingertip scans across the surface and convert it into recognisable information.
In this study, the research team designed a novel ‘ridge-based’ flexible sandwich structure based on the principle of electromagnetic induction, which can simulate the tangential deformation and dynamic recovery process of the skin when fingertips sweep across a surface. By embedding soft magnetised materials, the dynamic deformation produces rapid changes in spatial magnetic flux, thereby exciting an induced current (pulse signals) in a flexible conductive coil to provide real-time feedback on the deformation state of the device. On one hand, the study simulated and reproduced the effects of parameters such as pressure and speed on perception during fingertip scanning. On the other hand, the research team systematically explored the intrinsic connections between the dynamic behaviour of ‘stick-slip’ and surface information such as roughness, topological structure, and surface wetting. This flexible sensing platform is not only invaluable for further understanding ‘stick-slip’ behaviour in daily life, but also has important implications for the design of tactile feedback systems and emerging biomimetic devices such as soft robots.
The corresponding author of this study is Prof Zhou, and the first author is Fang Dan, a PhD student in IAPME. The research was funded by the Science and Technology Development Fund of the Macao SAR (File No.: 0057/2023/RIB2), Department of Science and Technology of Guangdong Province (File No.: 2022A0505030024), and UM (File No.: MYRG-GRG2024-00090-IAPME). The full text of the research article is available at: https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202417867.
| Source: Institute of Applied Physics and Materials Engineering | |
| Media Contact Information: | |
| Communications Office, University of Macau | |
| Albee Lei | Tel: (853) 8822 8004 |
| Jason Leong | Tel: (853) 8822 8322 |
| Email: | prs.media@um.edu.mo |